
Choosing the wrong underwater vehicle is a costly mistake. You need clarity, but technical jargon gets in the way. Let’s focus on the one question that truly matters.
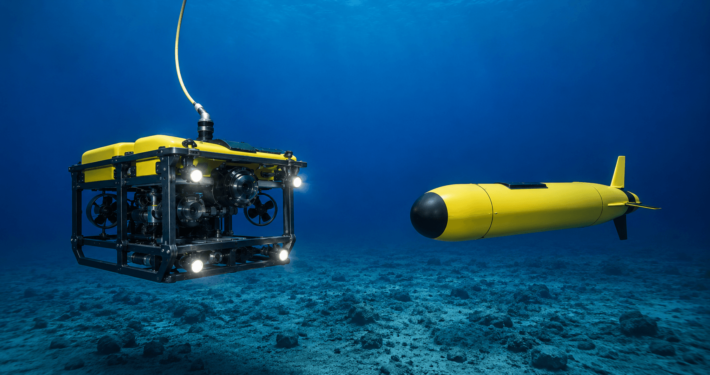
The main difference is control. A Remotely Operated Vehicle (ROV) uses a tether for real-time human control and power. An Autonomous Underwater Vehicle (AUV) is untethered and follows a pre-programmed mission.[^1] The choice depends entirely on your task’s need for direct intervention versus independence.

As an ROV parts manufacturer at ROVMAKER, a common question we get from buyers is simply, “AUV or ROV?” But we’ve learned this is the wrong question to start with. The answer isn’t in a dictionary definition; it’s in understanding the fundamental trade-offs each platform forces you to make. Let’s break down how to choose the right tool for your specific job.
Is the tether the most important distinction?
A simple cable seems like a small detail. But this tether introduces major operational limits and risks. Ignoring its impact can lead to mission failure and equipment damage.
Yes, the tether is the core difference. It gives an ROV unlimited power and instant, high-bandwidth data for complex tasks.[^2] But it also limits range and creates a risk of entanglement.[^3] An AUV’s lack of a tether offers freedom but requires complete self-sufficiency in power and decision-making.[^4]

When clients are trying to decide, the first thing we ask them to consider is the tether. It’s not just a power cord; it’s a lifeline that dictates your entire operational philosophy. An ROV’s tether means a human is always in the loop, seeing what the vehicle sees and making decisions in real time.[^5] This is perfect for jobs that require manipulation, like turning a valve or collecting a specific biological sample.[^6] You have constant power from the surface and a high-speed data link for crystal-clear video. However, that tether is also an anchor. It limits how far you can go and can get snagged on underwater structures. An AUV has no such leash. It’s free to cover vast distances on a pre-programmed path. But that freedom comes at the cost of real-time control and intervention. It operates on its own, which means you can’t react to unexpected discoveries until after the mission is complete.
Here is a simple breakdown of the trade-offs:
| Feature | ROV (Tethered) | AUV (Untethered) |
|---|---|---|
| Control | Real-time, human-in-the-loop | Pre-programmed, autonomous |
| Power | Virtually unlimited from surface | Limited by internal batteries |
| Data Link | High-bandwidth, instant video/data | Data recovered after mission |
| Range | Limited by tether length | Limited by battery endurance |
| Primary Advantage | Interactive, complex manipulation | Long-range, large-area survey |
How does your mission profile define the right tool?
You have a job to do underwater. But applying the wrong vehicle technology to your mission is a recipe for budget overruns and poor results. Let’s match the tool to the task.
Your mission is the deciding factor. If you need to perform interactive, close-up work in a defined area, like inspecting a ship’s hull, choose an ROV. For large-area, pre-planned data collection, like mapping the seafloor, an AUV is the more efficient choice.

The decision between an AUV and an ROV always comes back to your mission’s primary “verb.” Are you trying to inspect, interact, and manipulate? Or are you trying to survey, map, and collect data over a wide area? For a procurement manager making a significant investment, this is the key distinction. Let’s consider a hypothetical task like checking the structural integrity of a subsea oil rig. You need to look closely at specific welds, maybe use a tool to clean some marine growth, and get high-resolution video of potential cracks. This is an ROV’s job, hands down. You need the precise, real-time control and unlimited power to stay on station and use manipulators effectively.[^7] Now, imagine your task is to create a bathymetric map of a 10-square-kilometer area for a new subsea cable route. Sending an ROV on a tether to “mow the lawn” would be incredibly slow and inefficient. This is where an AUV excels. You program a survey grid, deploy it, and let it run its course for hours, collecting data autonomously and efficiently.
| Mission Type | Best Fit | Why It’s the Right Choice |
|---|---|---|
| Close-up Structural Inspection | ROV | Needs real-time control, high-res video, and potential manipulation. |
| Aquaculture Net Pen Monitoring | ROV | Requires hovering, close visual checks, and avoiding entanglement in a tight space. |
| Large-Area Seabed Mapping | AUV | Efficiently covers long distances on a pre-planned route without tether drag. |
| Oceanographic Data Collection | AUV | Can follow long, precise transects to measure temperature, salinity, and more. |
Which vehicle carries more operational risk?
Every underwater operation has risks. But choosing a vehicle means you’re also choosing a specific set of potential problems. Misunderstanding these risks can jeopardize your investment and your mission.
The risks are different, not necessarily greater. With an ROV, the primary risk is the tether getting snagged or tangled, potentially damaging the vehicle or the structure. With an AUV, the primary risk is a total loss of the asset and its data if it fails to return from its mission.[^8]

From a buyer’s perspective, risk equals potential financial loss. Both platforms have it, but the nature of that risk is fundamentally different. With an ROV, your biggest operational fear is entanglement. The tether is your connection, but it’s also a liability around complex structures like offshore platforms, shipwrecks, or even dense aquaculture nets. A snag can mean a difficult, costly recovery or even losing the vehicle entirely. However, because you have a live connection, you can often see a problem developing and react to it. The risk for an AUV is more absolute. The moment it goes underwater, it is completely on its own. If a critical system fails, if its navigation is thrown off, or if it gets trapped by an unforeseen obstacle, you might not know until it fails to show up at the recovery point. This means a potential total loss of a very expensive asset and, just as importantly, all the valuable data it collected. The decision is a trade-off: Do you prefer the manageable, ever-present risk of a physical tether or the all-or-nothing risk of full autonomy?
| Vehicle | Primary Operational Risk | Mitigation Strategy |
|---|---|---|
| ROV | Tether entanglement, damage to cable. | Careful piloting, using a tether management system (TMS), clear mission planning. |
| AUV | Total loss of vehicle and all collected data. | Redundant navigation and safety systems, thorough pre-mission checks, reliable acoustic tracking. |
Conclusion
The right choice is not about which vehicle is “better.” It’s about matching the tool to the task by weighing your mission’s need for real-time control against the benefits of autonomy.
[^1]: “What is the difference between an AUV and a ROV?”, https://oceanservice.noaa.gov/facts/auv-rov.html. A neutral technical definition from an oceanographic institution can support that ROVs are tethered and remotely controlled from the surface, while AUVs operate without a tether according to programmed missions. Evidence role: definition; source type: institution. Supports: ROVs are tethered vehicles controlled in real time by humans, while AUVs are untethered vehicles that execute programmed missions.. Scope note: Definitions may vary slightly across vehicle classes and hybrid systems.
[^2]: “Remotely Operated Vehicles (ROVs) – NOAA Ocean Exploration”, https://oceanexplorer.noaa.gov/technology/subs-rovs/. Technical descriptions of ROV systems can support that a tether or umbilical commonly carries power and communications between the surface and the vehicle, enabling continuous operation and high-rate data/video links. Evidence role: mechanism; source type: institution. Supports: An ROV tether can provide continuous surface power and high-bandwidth communications for complex underwater tasks.. Scope note: “Unlimited power” is contextual; actual endurance depends on the support vessel, cable rating, and system design.
[^3]: “Tracking data of a Remotely Operated Vehicle and its tether using a …”, https://pmc.ncbi.nlm.nih.gov/articles/PMC12808086/. Operational guidance on ROV deployment can support that tether length, drag, and snagging hazards constrain ROV range and introduce entanglement risks. Evidence role: mechanism; source type: government. Supports: An ROV tether can limit vehicle range and create an operational risk of entanglement.. Scope note: The degree of range limitation and entanglement risk depends on site geometry, currents, tether management, and pilot practice.
[^4]: “[PDF] AUTONOMOUS AUV MISSION PLANNING AND REPLANNING”, https://www.cse.psu.edu/~buu1/teaching/fall06/uuv/papers/Applications%20and%20Programming%20Support/Autonomous%20AUV%20Mission%20Planning%20and%20Replanning.pdf. Academic and institutional descriptions of AUVs can support that untethered vehicles rely on onboard batteries, computers, sensors, and autonomy software rather than continuous surface control. Evidence role: mechanism; source type: education. Supports: An untethered AUV must rely on onboard power and autonomous control to carry out its mission.. Scope note: Some AUVs may receive intermittent acoustic commands or status updates, so “complete” self-sufficiency should be understood relative to routine mission execution.
[^5]: “Remotely Operated Vehicles (ROVs) – NOAA Ocean Exploration”, https://oceanexplorer.noaa.gov/technology/subs-rovs/. Descriptions of ROV operations can support that pilots operate tethered ROVs from a control station using live video and sensor feedback transmitted through the tether. Evidence role: mechanism; source type: institution. Supports: ROVs are typically operated by human pilots using real-time video and sensor feedback transmitted through the tether.. Scope note: The statement applies to conventional ROV operation; some modern systems include assisted-control or semi-autonomous functions.
[^6]: “Collecting A Sample – NOAA Ocean Exploration”, https://oceanexplorer.noaa.gov/multimedia/okeanos-explorations-express-ex2301-gallery-media-ex2301-dive03-collecting-sample/. Institutional examples of ROV use can support that remotely operated vehicles are commonly fitted with manipulators and used for intervention tasks such as sampling, tool operation, and close inspection. Evidence role: case_reference; source type: institution. Supports: ROVs are well suited to underwater tasks requiring direct manipulation, such as operating tools or collecting targeted samples.. Scope note: The source can establish common use cases, but it does not prove that an ROV is optimal for every manipulation task.
[^7]: “Collision Detection for Underwater ROV Manipulator Systems”, https://pmc.ncbi.nlm.nih.gov/articles/PMC5948682/. Technical references on work-class ROVs can support that station keeping, real-time piloting, continuous power, and manipulator control are key capabilities for subsea inspection and intervention tasks. Evidence role: mechanism; source type: research. Supports: ROVs provide real-time control, sustained power, and manipulator capability useful for subsea inspection and intervention.. Scope note: “Unlimited power” is shorthand for surface-supplied power and does not remove constraints from vessel time, cable rating, or vehicle thermal limits.
[^8]: “Failure Modes and Reliability Analysis of Autonomous Underwater …”, https://ui.adsabs.harvard.edu/abs/2025JMSA..tmp…79C/abstract. AUV risk and reliability literature can support that loss of communication, navigation failure, power failure, or non-recovery can result in loss of the vehicle and unrecovered mission data. Evidence role: expert_consensus; source type: paper. Supports: AUV missions carry a non-recovery risk in which both the vehicle and onboard data may be lost if the vehicle fails to return.. Scope note: The cited source may describe a significant risk rather than prove it is the single primary risk across all AUV operations.

Leave a Reply
Want to join the discussion?Feel free to contribute!